Color Manipulation with the Colour Checker LUT Module

By Johannes Hanika
29 Jun 2016
I was lucky to get to spend some time in London with the darktable crew. Being the wonderful nerds they are, they were constantly working on something while we were there. One of the things that Johannes was working on was the colour checker module for darktable.
Having recently acquired a Fuji camera, he was working on matching color styles from the built-in rendering on the camera. Here he presents some of the results of what he was working on.
This was originally published on the darktable blog , and is being republished here with permission. —Pat
motivation
for raw photography there exist great presets for nice colour rendition:
- in-camera colour processing such as canon picture styles
- fuji film-emulation-like presets (provia velvia astia classic-chrome)
- pat david’s film emulation luts
unfortunately these are eat-it-or-die canned styles or icc lut profiles. you have to apply them and be happy or tweak them with other tools. but can we extract meaning from these presets? can we have understandable and tweakable styles like these?
in a first attempt, i used a non-linear optimiser to control the parameters of the modules in darktable’s processing pipeline and try to match the output of such styles. while this worked reasonably well for some of pat’s film luts, it failed completely on canon’s picture styles. it was very hard to reproduce generic colour-mapping styles in darktable without parametric blending.
that is, we require a generic colour to colour mapping function. this should be equally powerful as colour look up tables, but enable us to inspect it and change small aspects of it (for instance only the way blue tones are treated).
overview
in git master, there is a new module to implement generic colour mappings: the colour checker lut module (lut: look up table). the following will be a description how it works internally, how you can use it, and what this is good for.
in short, it is a colour lut that remains understandable and editable. that is, it is not a black-box look up table, but you get to see what it actually does and change the bits that you don’t like about it.
the main use cases are precise control over source colour to target colour mapping, as well as matching in-camera styles that process raws to jpg in a certain way to achieve a particular look. an example of this are the fuji film emulation modes. to this end, we will fit a colour checker lut to achieve their colour rendition, as well as a tone curve to achieve the tonal contrast.

to create the colour lut, it is currently necessary to take a picture of an it8 target (well, technically we support any similar target, but didn’t try them yet so i won’t really comment on it). this gives us a raw picture with colour values for a few colour patches, as well as a in-camera jpg reference (in the raw thumbnail..), and measured reference values (what we know it should look like).
to map all the other colours (that fell in between the patches on the chart) to meaningful output colours, too, we will need to interpolate this measured mapping.
theory
we want to express a smooth mapping from input colours \(\mathbf{s}\) to target colours \(\mathbf{t}\), defined by a couple of sample points (which will in our case be the 288 patches of an it8 chart).
the following is a quick summary of what we implemented and much better described in JP’s siggraph course [0].
radial basis functions
radial basis functions are a means of interpolating between sample points via
$$f(x) = \sum_i c_i\cdot\phi(| x - s_i|),$$
with some appropriate kernel \(\phi(r)\) (we’ll get to that later) and a set of coefficients \(c_i\) chosen to make the mapping \(f(x)\) behave like we want it at and in between the source colour positions \(s_i\). now to make sure the function actually passes through the target colours, i.e. \(f(s_i) = t_i\), we need to solve a linear system. because we want the function to take on a simple form for simple problems, we also add a polynomial part to it. this makes sure that black and white profiles turn out to be black and white and don’t oscillate around zero saturation colours wildly. the system is
$$ \left(\begin{array}{cc}A &P\\P^t & 0\end{array}\right) \cdot \left(\begin{array}{c}\mathbf{c}\\\mathbf{d}\end{array}\right) = \left(\begin{array}{c}\mathbf{t}\\0\end{array}\right)$$
where
$$ A=\left(\begin{array}{ccc} \phi(r_{00})& \phi(r_{10})& \cdots \\ \phi(r_{01})& \phi(r_{11})& \cdots \\ \phi(r_{02})& \phi(r_{12})& \cdots \\ \cdots & & \cdots \end{array}\right),$$
and \(r_{ij} = | s_i - t_j |\) is the distance (CIE 76 \(\Delta\)E, \(\sqrt{(L_s - L_t)^2 + (a_s - a_t)^2 + (b_s - b_t)^2}\) ) between source colour \(s_i\) and target colour \(t_j\), in our case
$$P=\left(\begin{array}{cccc} L_{s_0}& a_{s_0}& b_{s_0}& 1\\ L_{s_1}& a_{s_1}& b_{s_1}& 1\\ \cdots \end{array}\right)$$
is the polynomial part, and \(\mathbf{d}\) are the coefficients to the polynomial part. these are here so we can for instance easily reproduce \(t = s\) by setting \(\mathbf{d} = (1, 1, 1, 0)\) in the respective row. we will need to solve this system for the coefficients \(\mathbf{c}=(c_0,c_1,\cdots)^t\) and \(\mathbf{d}\).
many options will do the trick and solve the system here. we use singular value decomposition in our implementation. one advantage is that it is robust against singular matrices as input (accidentally map the same source colour to different target colours for instance).
thin plate splines
we didn’t yet define the radial basis function kernel. it turns out so-called thin plate splines have very good behaviour in terms of low oscillation/low curvature of the resulting function. the associated kernel is
$$\phi(r) = r^2 \log r.$$
note that there is a similar functionality in gimp as a gegl colour mapping operation (which i believe is using a shepard-interpolation-like scheme).
creating a sparse solution
we will feed this system with 288 patches of an it8 colour chart. that means, with the added four polynomial coefficients, we have a total of 292 source/target colour pairs to manage here. apart from performance issues when executing the interpolation, we didn’t want that to show up in the gui like this, so we were looking to reduce this number without introducing large error.
indeed this is possible, and literature provides a nice algorithm to do so, which is called orthogonal matching pursuit [1].
this algorithm will select the most important hand full of coefficients \(\in \mathbf{c},\mathbf{d}\), to keep the overall error low. In practice we run it up to a predefined number of patches (\(24=6\times 4\) or \(49=7\times 7\)), to make best use of gui real estate.
the colour checker lut module

gui elements
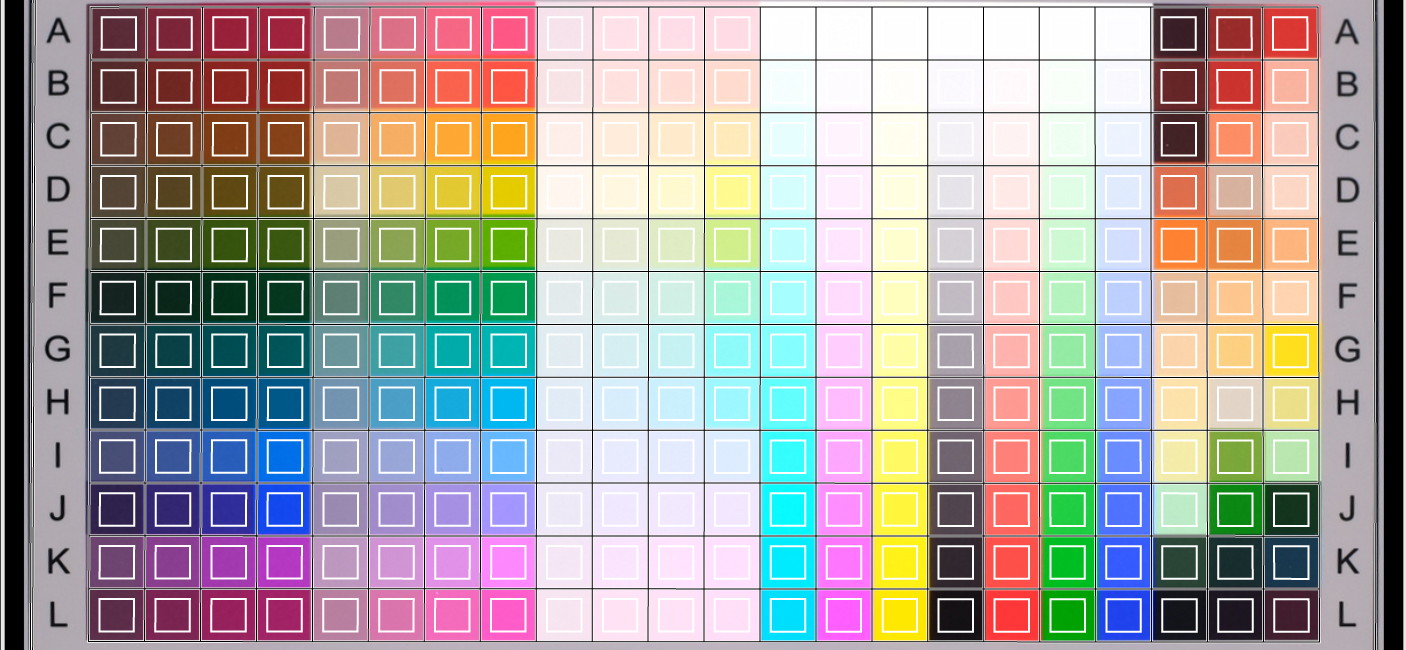
when you select the module in darkroom mode, it should look something like the image above (configurations with more than 24 patches are shown in a 7\(\times\)7 grid instead). by default, it will load the 24 patches of a colour checker classic and initialise the mapping to identity (no change to the image).
- the grid shows a list of coloured patches. the colours of the patches are the source points \(\mathbf{s}\).
- the target colour \(t_i\) of the selected patch \(i\) is shown as offset controlled by sliders in the ui under the grid of patches.
- an outline is drawn around patches that have been altered, i.e. the source and target colours differ.
- the selected patch is marked with a white square, and the number shows in the combo box below.
interaction
to interact with the colour mapping, you can change both source and target colours. the main use case is to change the target colours however, and start with an appropriate palette (see the presets menu, or download a style somewhere).
- you can change lightness (L), green-red (a), blue-yellow (b), or saturation (C) of the target colour via sliders.
- select a patch by left clicking on it, or using the combo box, or using the colour picker
- to change source colour, select a new colour from your image by using the colour picker, and shift-left-click on the patch you want to replace.
- to reset a patch, double-click it.
- right-click a patch to delete it.
- shift-left-click on empty space to add a new patch (with the currently picked colour as source colour).
example use cases
example 1: dodging and burning with the skin tones preset
to process the following image i took of pat in the overground, i started with the skin tones preset in the colour checker module (right click on nothing in the gui or click on the icon with the three horizontal lines in the header and select the preset).
then, i used the colour picker (little icon to the right of the patch# combo box) to select two skin tones: very bright highlights and dark shadow tones. the former i dragged the brightness down a bit, the latter i brightened up a bit via the lightness (L) slider. this is the result:


example 2: skin tones and eyes
in this image, i started with the fuji classic chrome-like style (see below for a download link), to achieve the subdued look in the skin tones. then, i picked the iris colour and saturated this tone via the saturation slider.
as a side note, the flash didn’t fire in this image (iso 800) so i needed to stop it up by 2.5ev and the rest is all natural lighting..



use darktable-chart to create a style
as a starting point, i matched a colour checker lut interpolation function to
the in-camera processing of fuji cameras. these have the names of old film and
generally do a good job at creating pleasant colours. this was done using the
darktable-chart utility, by matching raw colours to the jpg output (both in Lab space in the darktable pipeline).
here is the link to the fuji styles
, and how to use them
.
i should be doing pat’s film emulation presets with this, too, and maybe
styles from other cameras (canon picture styles?). darktable-chart will
output a dtstyle file, with the mapping split into tone curve and colour
checker module. this allows us to tweak the contrast (tone curve) in isolation
from the colours (lut module).
these styles were created with the X100T model, and reportedly they work so/so with different camera models. the idea is to create a Lab-space mapping which is well configured for all cameras. but apparently there may be sufficient differences between the output of different cameras after applying their colour matrices (after all these matrices are just an approximation of the real camera to XYZ mapping).
so if you’re really after maximum precision, you may have to create the styles yourself for your camera model. here’s how:
step-by-step tutorial to match the in-camera jpg engine
note that this is essentially similar to pascal’s colormatch script, but will result in an editable style for darktable instead of a fixed icc lut.
-
need an it8 (sorry, could lift that, maybe, similar to what we do for basecurve fitting)
-
shoot the chart with your camera:
- shoot raw + jpg
- avoid glare and shadow and extreme angles, potentially the rims of your image altogether
- shoot a lot of exposures, try to match L=92 for G00 (or look that up in your it8 description)
-
develop the images in darktable:
- lens and vignetting correction needed on both or on neither of raw + jpg
- (i calibrated for vignetting, see lensfun)
- output colour space to Lab (set the secret option in
darktablerc:allow_lab_output=true) - standard input matrix and camera white balance for the raw, srgb for jpg.
- no gamut clipping, no basecurve, no anything else.
- maybe do perspective correction and crop the chart
- export as float pfm
-
darktable-chart- load the pfm for the raw image and the jpg target in the second tab
- drag the corners to make the mask match the patches in the image
- maybe adjust the security margin using the slider in the top right, to avoid stray colours being blurred into the patch readout
- you need to select the gray ramp in the combo box (not auto-detected)
- export csv




edit the csv in a text editor and manually add two fixed fake patches HDR00
and HDR01:
name;fuji classic chrome-like
description;fuji classic chrome-like colorchecker
num_gray;24
patch;L_source;a_source;b_source;L_reference;a_reference;b_reference
A01;22.22;13.18;0.61;21.65;17.48;3.62
A02;23.00;24.16;4.18;26.92;32.39;11.96
...
HDR00;100;0;0;100;0;0
HDR01;200;0;0;200;0;0
...
this is to make sure we can process high-dynamic range images and not destroy
the bright spots with the lut. this is needed since the it8 does not deliver
any information out of the reflective gamut and for very bright input. to fix
wide gamut input, it may be needed to enable gamut clipping in the input colour
profile module when applying the resulting style to an image with highly
saturated colours. darktable-chart does that automatically in the style it
writes.
- fix up style description in csv if you want
- run
darktable-chart --csv - outputs a
.dtstylewith everything properly switched off, and two modules on: colour checker + tonecurve in Lab
fitting error
when processing the list of colour pairs into a set of coefficients for the thin plate spline, the program will output the approximation error, indicated by average and maximum CIE 76 \(\Delta\)E for the input patches (the it8 in the examples here). of course we don’t know anything about colours which aren’t represented in the patch. the hope would be that the sampling is dense enough for all intents and purposes (but nothing is holding us back from using a target with even more patches).
for the fuji styles, these errors are typically in the range of mean \(\Delta E\approx 2\) and max \(\Delta E \approx 10\) for 24 patches and a bit less for 49. unfortunately the error does not decrease very fast in the number of patches (and will of course drop to zero when using all the patches of the input chart).
provia 24:rank 28/24 avg DE 2.42189 max DE 7.57084
provia 49:rank 53/49 avg DE 1.44376 max DE 5.39751
astia-24:rank 27/24 avg DE 2.12006 max DE 10.0213
astia-49:rank 52/49 avg DE 1.34278 max DE 7.05165
velvia-24:rank 27/24 avg DE 2.87005 max DE 16.7967
velvia-49:rank 53/49 avg DE 1.62934 max DE 6.84697
classic chrome-24:rank 28/24 avg DE 1.99688 max DE 8.76036
classic chrome-49:rank 53/49 avg DE 1.13703 max DE 6.3298
mono-24:rank 27/24 avg DE 0.547846 max DE 3.42563
mono-49:rank 52/49 avg DE 0.339011 max DE 2.08548
future work
it is possible to match the reference values of the it8 instead of a reference jpg output, to calibrate the camera more precisely than the colour matrix would.
- there is a button for this in the
darktable-charttool - needs careful shooting, to match brightness of reference value closely.
- at this point it’s not clear to me how white balance should best be handled here.
- need reference reflectances of the it8 (wolf faust ships some for a few illuminants).
another next step we would like to take with this is to match real film footage (porta etc). both reference and film matching will require some global exposure calibration though.
references
- [0] Ken Anjyo and J. P. Lewis and Frédéric Pighin, “Scattered data interpolation for computer graphics” in Proceedings of SIGGRAPH 2014 Courses, Article No. 27, 2014. pdf
- [1] J. A. Tropp and A. C. Gilbert, “Signal Recovery From Random Measurements Via Orthogonal Matching Pursuit”, in IEEE Transactions on Information Theory, vol. 53, no. 12, pp. 4655-4666, Dec. 2007.